Determining the correlation between external structure and center of pressures (COP) analysis data of Aksaray Malakli dogs: A pilot study
Keywords:
Aksaray Malakli Dogs, butterfly diagram, cop analysis, gait analysisAbstract
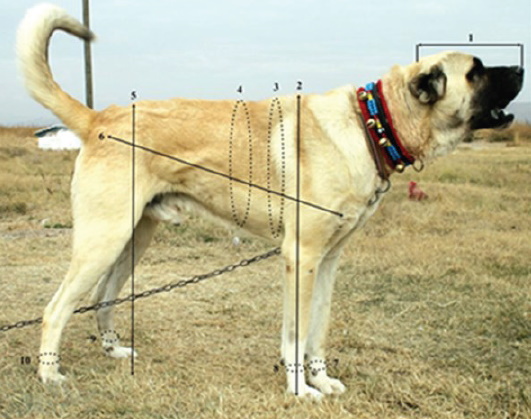
The Center of Pressure (COP) refers to the projection of the center of mass onto the support surface. The COP analysis is used to evaluate postural stability and center of mass. In this study, the aim is to reveal the COP analysis data and pressuresensitive gait analysis systems of Aksaray Malakli dogs and to determine the correlation between these data and external structural features. For study, 20 Aksaray Malakli dogs were used. An average of 20 steps were taken by each dog. External structure, joint angles and tree index measurements, which were predicted to be associated with walking in dogs, were taken. Data such as cadence, velocity (km/h), butterfly parameters, time change hell (sec), and time change hell were recorded in mm using the butterfly diagrams. In males, 66.7±7.09% of the mean force was applied by the forelimbs, while the remaining force was applied by the hindlimbs. In females, 66.40±2.72% of the mean force was applied by the forelimbs and 33.60±2.72% by the hindlimbs. In the butterfly parameters, statistical differences were found between the sexes in terms of length of the gait line (P<0.05) and anterior/posterior position parameter (P<0.001), but no statistical difference was found in the lateral symmetry parameter (P>0.05). Consequently, the study was conducted to reveal the kinetic characteristics of Aksaray Malakli dogs by determining the correlations between some gait parameters in relation to sex and external structural characteristics of the breed in question. In addition, it was intended to provide reference data for the future clinical and experimental studies on Aksaray Malakli dogs.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Gulsah Gungoren, İsmail Demircioglu, Yasin Demiraslan, Nazan Gezer Ince

This work is licensed under a Creative Commons Attribution 4.0 International License.